Desde hace ya más de 7 años, estamos viviendo un cambio importante a nivel de robótica, buscando principalmente 2 objetivos: Automatizar tareas que con el robot industrial estándar no eran posibles por cuestiones de tamaño y espacio en fábrica; y simplificar la tarea de integración de los robots en los procesos para facilitar su acceso a clientes más pequeños con menos capacidad y recursos técnicos en robótica.
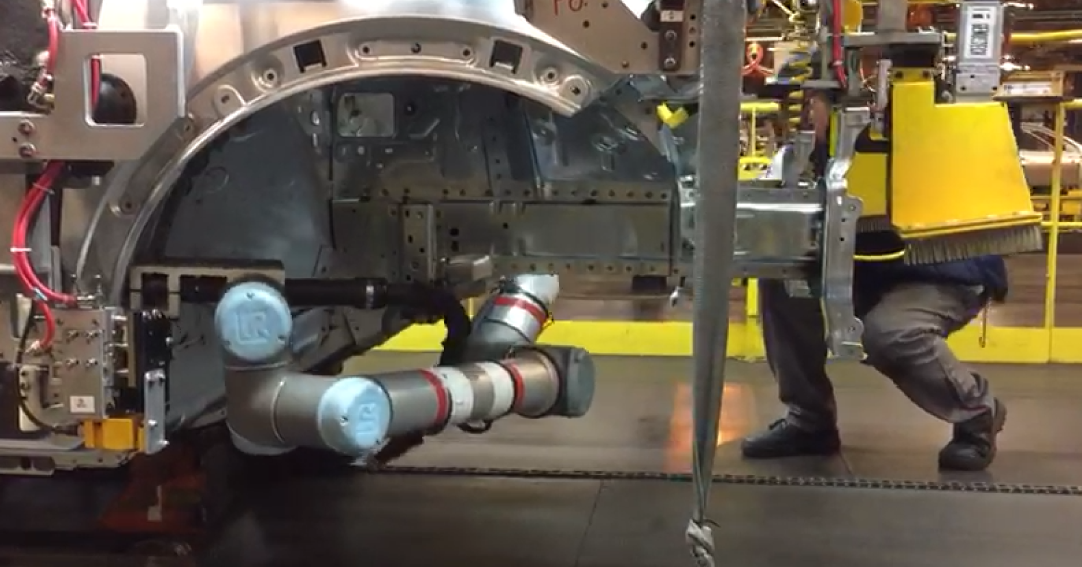
BRAZO ROBÓTICO COLABORATIVO
Tras conocerse en el 2005 en la Universidad de Dinamarca, Esben Østergaard, Kasper Støy y Kristian Kassow fundan oficialmente la primera empresa dedicada la robótica colaborativa. Su objetivo: hacer que la robótica sea accesible para las pequeñas y medianas empresas. En el 2008 venden su primer cobot y desde ahí empieza el crecimiento con el lanzamiento en el 2012 de su segundo modelo y en el 2015 de uno más pequeño
A día de hoy, esta firma ya tiene instalados en todo el mundo más de 60.000 cobots, y su crecimiento anual lo ha hecho exponencialmente, gracias principalmente a las pequeñas y medianas empresas donde su precio asequible y su facilidad de programación lo hacen un elemento imprescindible en su fábrica de producción.
Hay que tener en cuenta que el cobot es un robot colaborativo, pero que en cada aplicación tenemos que realizar su evaluación de riesgos, para así conocer todos los detalles de ésta, y revisar si necesitamos incluir algún elemento adicional de seguridad para evitar accidentes con los operario, al final, si a dicho cobot le instalamos una herramienta cortante o que trabaje a alta temperatura, tendremos que asegurar que no se mueve en condiciones de trabajo cuando tengan a una persona en sus alrededores.
Cada día se pueden encontrar aplicaciones de lo más variadas y en sectores de lo más diverso, siendo de lo más comunes las aplicaciones de carga de centros de mecanizado, los paletizados de final de línea y las operaciones de movimiento de piezas de unos puestos a otros para realizar sobre ellos las diferentes operaciones de ensamblaje.
En los sectores productivos gallegos existen aplicaciones tan curiosas como la del dispensado del sirope de chocolate para la preparación de cafés, el pulido de puertas para la fabricación de vehículos (con su sensores de fuerza integrados, les aporta más sensibilidad para este tipo de aplicaciones), el encajado de productos mediante bin picking y una máquina formadora de cajas.
Para este tipo de aplicaciones es tan importante el cobot en sí como la herramienta que se desarrolla para el robot, y todo ello es gracias a que el fabricante del cobot trabaja mano a mano con los desarrolladores de periféricos, para que éstos sean tan sencillos de usar y programar como el propio robot, y que, a la vez, tengan un certificado de que dicho accesorio ha sido probado y validado para su uso.
ROBOTICA MOVIL

Al igual que la robótica colaborativa en cuanto a brazos robóticos, desde hace ya casi 10 años, la robótica móvil ha ido evolucionando hacia una integración de los robots autónomos mucho más sencilla y accesible para todas las empresas. En 2011, un profesor universitario de Dinamarca Niels Jul Jacobsen, creó el primer ejemplo de robot autónomo sencillo usando bloques de Lego, y desde ahí su evolución fue muy rápida hasta que sacaron el primero modelo industrial en el 2015.
Este AMR (Se diferencia del AGV ya que no es guiado mediante ningún método externo, sea filo, baliza u otro accesorio), tiene la ventaja de poder ajustar su ruta constantemente según sea su entorno, consiguiendo de esta manera, que pueda convivir con personas y otras carretillas en los pasillos de la fábrica. Usando la misma tecnología que los actuales coches autónomos, usa tecnología Lidar y varios sensores para posicionarse, auto ajustarse y calcular su ruta. De esta forma, puede navegar entre unas zonas y otras de forma flexible y más rápida que los tradicionales AGV’s filoguiados.
Con la reducción de costes en sensores de seguridad, motores y el resto del hardware necesario para estos robots móviles, se ha conseguido que sea una tecnología al alcance de cualquier empresa, con lo que realmente se ha conseguido el objetivo principal de tener un robot para la zona logística que tenga un precio adaptado a las necesidades del mercado.
En los primeros años, las aplicaciones más solicitadas eran simples, desde mover cajas desde almacén a producción, o eso mismo, pero con pallets. Ahora mismo las necesidades van más allá, y se consiguen comunicaciones con el sistema principal de rodillos del cliente, para su descarga directa a un accesorio de rodillos del robot. También se han instalado sobre él accesorios más especiales como un cajón de seguridad para hospitales para el transporte de material entre plantas, o el sistema de infrarrojos para la limpieza y desinfección de las salas en oficinas y edificios públicos.
Sus especificaciones van desde los 100 Kg de carga, hasta los 1.350 Kg, con velocidades hasta 2 m/s y con un control de flota que puede soportar y coordinar hasta 50 robots en toda la fábrica conectándolos a la wifi general.
CONCLUSIONES
La mano de obra es cada vez más complicada de conseguir y la robótica colaborativa y la robótica móvil sencilla, contribuyen a eliminar las tareas más repetitivas y tediosas para el operario (de ahí nació en su momento el término robot, que en checo quiere decir labor tediosa). Veremos con que más nos siguen sorprendiendo con esta tecnología, y hasta donde pueden llegar en términos de automatización, quizás pronto todos tengamos uno en casa dándonos asistencia para esas tareas más repetitivas en nuestro día a día.
Aitor Fernández (Robotplus)
José Ignacio Armesto (Universidad de Vigo)
Socio de ISA España
